color_ir_sensor — Color IR Sensor¶
The main functionality and function of the color_ir_sensor module
Color infrared sensor description¶
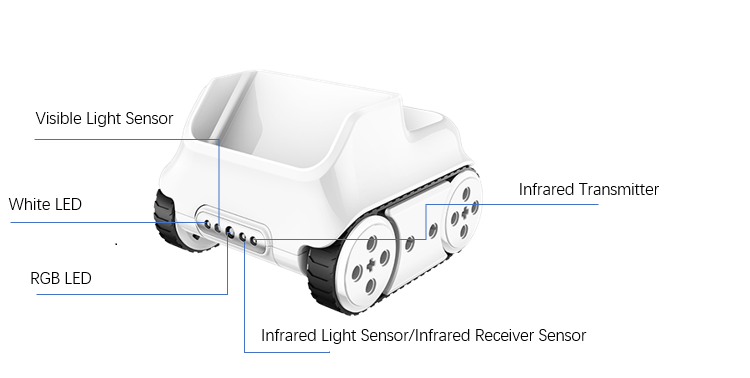
As shown in the figure, the sensors in front of the rocky are
- White LED:light white to achieve detecting the visible light reflection intensity on the surface of the object with using visible light sensor.
- Visible Light Sensor:detect the visible light intensity.
- RGB LED:light LED with specific RGB value to achieve recognizing the color with using the visible light sensor.
- Infrared Light Sensor:detect the infrared light intensity
- Infrared Transmitter:transmit infrared light to achieve detecting the infrared light reflection intensity on the surface of the object with using the infrared light sensor.
Function¶
-
color_ir_sensor.get_red()¶ Get the size of the red color component of the color sensor, parameter range is
0 ~ 100.
-
color_ir_sensor.get_green()¶ Get the size of the green color component of the color sensor, parameter range is
0 ~ 100.
-
color_ir_sensor.get_blue()¶ Get the size of the blue color component of the color sensor, parameter range is
0 ~ 100.
-
color_ir_sensor.is_color(color_str)¶ Judge whether a matching color is detected, parameters:
- color_str color type, including
red, green, blue, yellow, cyan, purple, white, black, the corresponding parameter isred,green,blue,yellow,cyan,purple,white,black. Return value is boolean,Turerepresents color matching,Falserepresents the colors do not match.
- color_str color type, including
-
color_ir_sensor.get_light_strength()¶ Get the ambient light intensity detected by the visible light sensor, parameter range is
0 ~ 100.
-
color_ir_sensor.get_greyness()¶ Get the grayscale value detected by the visible light sensor (using RGB LED and visible light sensor), parameter range is
0 ~ 100.
-
color_ir_sensor.get_reflected_light()¶ Get the visible light reflection intensity detected by the visible light sensor, parameter range is
0 ~ 100.
-
color_ir_sensor.get_reflected_infrared()¶ Get the infrared light reflection intensity detected by the infrared light receiving tube, parameter range is
0 ~ 100.
-
color_ir_sensor.is_obstacle_ahead()¶ Detect if there are obstacles in front, the return value is boolean,
Turerepresents obstacles,Falserepresents no obstacles.
-
color_ir_sensor.set_led_color(color_name)¶ Set color for the RGB LED light of the color sensor, parameters:
- color_name including
red, green, blue, yellow, cyan, purple, white, black, the corresponding parameter isred,green,blue,yellow,cyan,purple,white,black.
- color_name including
Sample Code:¶
import codey
import rocky
while True:
if rocky.color_ir_sensor.is_obstacle_ahead():
rocky.color_ir_sensor.set_led_color('white')
else:
rocky.color_ir_sensor.set_led_color('black')